Author(s): Ramona Devi
This paper delves into the concept of stability augmentation in lateral-directional dynamics, focusing on a multivariable approach. In aircraft control systems, ensuring lateral-directional stability is crucial for safe and efficient flight. The primary objective is to examine the feedback control system's role in enhancing stability and how it interacts with the aircraft's inherent dynamics. We begin by exploring the basic augmentation system for lateraldirectional dynamics, which includes the feedback of body-axis roll rate to ailerons and yaw rate to the rudder, commonly referred to as the yaw damper.
One of the key challenges addressed in this paper is the need to overcome the interference caused by the yaw damper when coordinating turns. This interference results from the constant nonzero yaw rate present during coordinated turns. To address this issue, the concept of "transient rate feedback" is introduced, which uses a washout filter to differentiate the feedback signal and minimize its effect during steady-state conditions.
The paper presents mathematical models and transfer functions that describe the behavior of the lateral-directional augmentation system. It discusses the impact of different parameters, such as the time constants of actuators and washout filters, on the system's performance. The design of the feedback loops for roll and yaw control is elaborated upon, emphasizing the trade-offs between roll response, dutch roll damping, and roll-yaw coupling.
Simulation results are used to evaluate the effectiveness of the stability augmentation system in improving the aircraft's roll response and dutch roll damping under varying flight conditions. The paper concludes with insights into the challenges and benefits of multivariable control system design for lateral-directional stability augmentation in aircraft.
Lateral-directional stability is a critical aspect of aircraft control and is essential for safe and efficient flight. This paper explores stability augmentation in lateral-directional dynamics, with a specific focus on a multivariable approach. The lateral-directional dynamics of an aircraft involve complex interactions between roll, yaw, and sideslip motions [1-5]. This complexity necessitates the use of feedback control systems to enhance stability and ensure the aircraft's performance in various flight conditions.
The primary augmentation system discussed in this paper involves the feedback of body-axis roll rate to the ailerons and yaw rate to the rudder, commonly referred to as the yaw damper. This feedback system aims to modify the roll subsidence mode and Dutch roll mode, which are essential for lateral-directional stability.
One of the primary challenges addressed in this paper is the interference caused by the yaw damper during coordinated turns. In coordinated turns, the aircraft experiences a constant nonzero yaw rate, which the yaw-rate feedback attempts to oppose. This interference requires the pilot to apply larger-than-normal rudder pedal inputs to coordinate turns, which is often considered objectionable. To mitigate this issue, the concept of "transient rate feedback" is introduced, where the feedback signal is differentiated to minimize its impact during steady-state conditions. This is achieved using a simple first-order high-pass filter known as a "washout filter."
The design of the stability augmentation system involves considering various parameters, including the time constants of actuators and washout filters. The interaction between roll response, dutch roll damping, and roll-yaw coupling is explored to strike a balance between improving roll response and maintaining stability.
The paper also presents mathematical models and transfer functions that describe the behavior of the lateral-directional augmentation system. These models are used to assess the impact of different control system parameters on the aircraft's lateral- directional stability.
To evaluate the effectiveness of the stability augmentation system, the paper includes simulation results that demonstrate how the system enhances roll response and Dutch roll damping under various flight conditions. The simulation considers factors such as feedback gains and time constants to analyze the trade-offs and design considerations involved in stability augmentation.
In conclusion, this paper provides insights into the challenges and benefits of using a multivariable approach to design stability augmentation systems for lateral-directional dynamics in aircraft. It emphasizes the importance of balancing roll response and Dutch roll damping while addressing the interference caused by the yaw damper during coordinated turns. Section 2 provides an overview of the lateral dynamics augmentation system. Section 3 talks about the challenges of the yaw damper feedback. The role of feedback in SAS is discussed in section 4. Design considerations and tradeoffs are explained in section 5. Section 6 gives the lateral model of F-16 aircraft and the design procedure for the lateral SAS is given in section 7.
The augmentation system for lateral-directional dynamics involves feedback control mechanisms that modify the roll and yaw characteristics of an aircraft [6-7]. Figure 1 illustrates the basic structure of this system, which utilizes body-axis roll rate feedback to control the ailerons and yaw rate feedback to control the rudder. This arrangement is commonly referred to as the yaw damper.
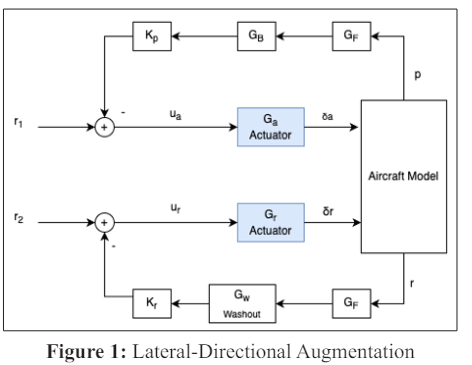
The primary objectives of this augmentation system are to:
1. Modify the roll subsidence mode by using feedback from body-axis roll rate.
2. Modify the dutch roll mode by using feedback from yaw rate.
The interaction between lateral (rolling) motion and yawing and sideslipping (directional) motions necessitates using multivariable state equations. These state equations consider two inputs (ailerons and rudder) and two or more outputs, as implied by Figure 1.
The analysis in this paper primarily focuses on the simple feedback scheme depicted in Figure 1. However, it's important to note that additional feedback couplings between the roll and yaw channels can be introduced in more advanced designs.
One of the significant challenges in the augmentation system design is related to the yaw damper feedback [8-10]. While the yaw damper aims to generate a yawing moment to counter any yaw rate that arises from the Dutch roll mode, it introduces a complication during coordinated turns.
In a coordinated steady-state turn, the aircraft has a constant nonzero yaw rate. The yaw-rate feedback system attempts to oppose this yaw rate, requiring the pilot to apply larger-than- normal rudder pedal inputs to coordinate the turn. This excessive pilot input is often considered objectionable and hampers precise control.
To address this issue, the paper proposes the concept of "transient rate feedback." This feedback mechanism involves differentiating the feedback signal so that it vanishes during steady-state conditions. The differentiation is achieved using a first-order high-pass filter, referred to as a "washout filter" in this context.
To analyze and design the stability augmentation system, transfer functions are employed to model the relationships between control inputs (aileron and rudder deflections) and aircraft responses (roll rate, yaw rate, etc.). These transfer functions help in understanding the behavior of the system and its response to different input signals.
Key transfer functions of interest in this context include those related to roll rate, yaw rate, and their corresponding control inputs (aileron and rudder deflections). These transfer functions are instrumental in designing the feedback loops and assessing the system's performance.
Feedback gains play a crucial role in shaping the behavior of the augmentation system. Adjusting the feedback gains can significantly impact roll response, dutch roll damping, and roll- yaw coupling. Careful selection of feedback gains is essential to strike a balance between these competing factors and achieve the desired lateral-directional stability.
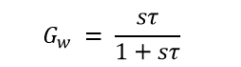
The design of the stability augmentation system involves several considerations and trade-offs. One of the primary factors is the time constant of the washout filter, denoted as ?w. The washout filter's time constant is crucial in determining the system's behavior. Too large a value can interfere with the entry into turns, while too small a value may reduce dutch roll damping. The transfer function of such a filter is given by:
Furthermore, the design considers the effect of feedback gains, such as kp for roll and kr for yaw. These feedback gains influence the natural frequencies and damping ratios of the Dutch roll and other lateral-directional modes. Optimal values for these feedback gains must be determined to achieve the desired lateral-directional stability.
Additionally, compensation networks, such as phase lead filters, can be incorporated into the feedback loops to further enhance the system's performance. These compensation techniques can be explored to address specific challenges and improve stability.
F-16 dynamics is considered at zero altitude with the nominal cg position and an airspeed of 205.0ft/s, the roll pole is real and quite slow and the dutch roll is very lightly damped [11-13]. The state equations can be found by linearizing and a five-state set of lateral-directional equations can be decoupled from the full thirteen-state set. The coefficient matrices can be found to be
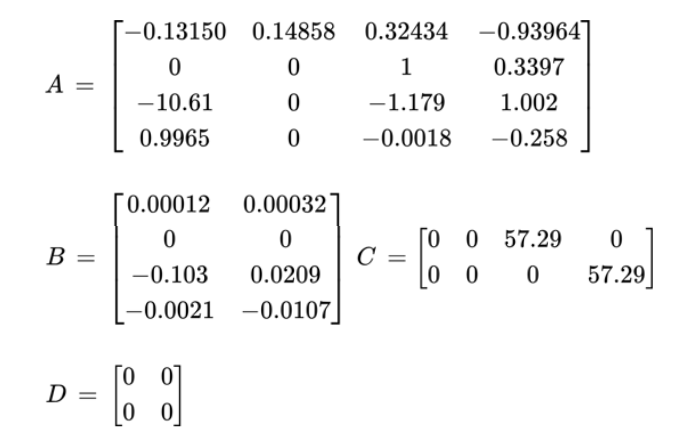
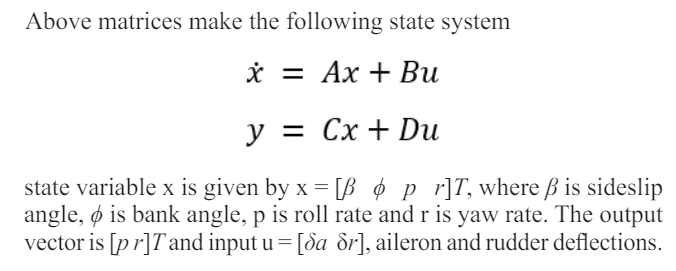
The aileron and rudder actuators will be taken as simple lags with a corner frequency of 20.2rad/s and the bending mode filter will be omitted for the sake of simplicity. The coefficient matrices A, B, C and D makes the plant. Positive deflection of the control surfaces leads to the negative deflection of the principle moments, so to use the positive gain root locus for design, a phase reversal is inserted at the output of the control actuators. The ailron and rudder actuators will be combined into two-input, two-output state model and cascaded with the plant. The washout time constant ?w is a compromise, too large a value is undesirable since the yaw damper will then interfere with the entry into turns. Root locus design plot can be used to show that too small a value will reduce the achievable dutch roll damping. The time constant chosen for this paper is ?w = 1.0.
The simulation is done in MATLAB and results are shown in the next section.
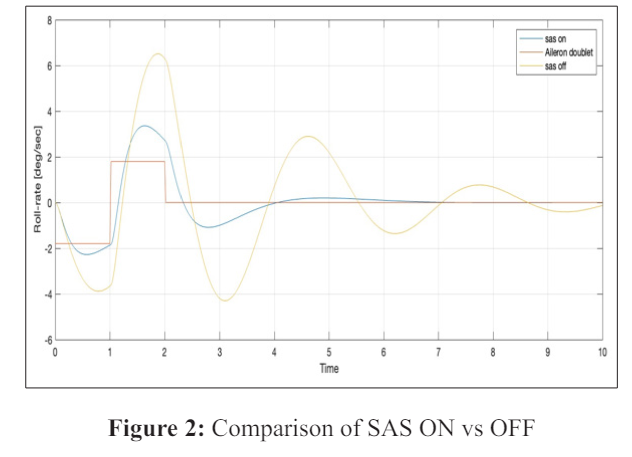
The results of the stability augmentation system design are presented based on simulations and analysis. The system's performance is evaluated under different conditions and with varying design parameters. Figure 2 compares the roll rate response of the open loop dynamics (augmented with actuators) with the closed loop system response. A doublet served as an input which is negative for 1s and positive for 1s, then zero with unit amplitude. In the closed loop system gains K p = 0.4, K r =1.3 are used for the simulation.
This paper has explored the concept of stability augmentation in lateral-directional dynamics, focusing on a multivariable approach. The stability augmentation system plays a crucial role in ensuring safe and efficient aircraft control. The key findings and conclusions from this analysis can be summarized as follows:
1. The stability augmentation system, with feedback control of roll rate and yaw rate (yaw damper), is essential for enhancing lateral-directional stability.
2. Interference caused by the yaw damper during coordinated turns can be effectively mitigated by introducing "transient rate feedback" through a washout filter.
3. Feedback gains, such as kp and kr, are critical in shaping the system's behavior. Optimal feedback gain values can be determined to achieve the desired lateral-directional stability.
4. The design of the stability augmentation system involves trade-offs, particularly in balancing roll response and dutch roll damping. The selection of parameters, including the washout filter time constant, is essential to strike the right balance.
4. The design of the stability augmentation system involves trade-offs, particularly in balancing roll response and dutch roll damping. The selection of parameters, including the washout filter time constant, is essential to strike the right balance.
5. Simulation results demonstrate the system's ability to improve roll response, especially at low dynamic pressure and high angles of attack. Additionally, the system enhances Dutch roll damping, making it valuable during landing approaches in gusty crosswind conditions.
In conclusion, this paper highlights the challenges and benefits of employing a multivariable approach to design stability augmentation systems for lateral-directional dynamics in aircraft. It underscores the importance of optimizing system parameters to achieve the desired lateral-directional stability while addressing interference issues during coordinated turns. The stability augmentation system is a critical component of modern aircraft control systems, ensuring safe and precise flight.
1. McRuer DT, Graham DR, Graham DJ (1974) Aircraft Dynamics and Control. Princeton University Press https:// press.princeton.edu/books/hardcover/9780691630328/ aircraft-dynamics-and-automatic-control.
2. Zhang H, Jiang J, He Y (2007) Flight control system design: A case study. Aerospace Science and Technology 11: 589-596.
3. Bobula GA, Lawrence DA, Heffley RK, Gilbert MG (1985) Application of Modern Control Theory to Flight Control Design. NASA Technical Memorandum https://ntrs.nasa. gov/citations/19750015501.
4. Gilyard GB, Enns DF (1982) Modeling and Control Design for Advanced Aircraft. NASA Technical Paper 2081.
5. Wells SR, Rankin AM (1988) A review of flying qualities research: Control augmentation. NASA Contractor Report 179178.
6. Tobak M, O'connor AL (1973) An approach to the design of pitch and roll SAS for an unstable airplane. NASA Contractor Report 2048.
7. Sinha NK (2006) Design and implementation of a pitch control augmentation system for a small UAV. AIAA Guidance, Navigation, and Control Conference and Exhibit.
8. Moerder DD, Bhat UN, Wells SR (2006) Pitch axis control augmentation system design for an air-breathing hypersonic vehicle. AIAA Guidance, Navigation, and Control Conference and Exhibit.
9. Flandro GA, Roskam J, Tobak M (2013) Low-Speed Stability and Control with Particular Reference to Tilt-Wing Aircraft. CreateSpace Independent Publishing Platform.
10. Stevens BL, Lewis FL (2003) Aircraft Control and Simulation. Wiley-Interscience.
11. Hill P, Chesley RE (2012) F-16XL computational model. In AIAA Modeling and Simulation Technologies Conference 5370.
12. Ahmadi A, Mohseni H, Askari F (2015) Modeling and Simulating F-16 Aircraft in a Six-Degree-of-Freedom Environment. In Proceedings of the 2015 Winter Simulation Conference 3758-3769.
13. Ahi K (1997) Computer-based modeling and simulation of the F-16 aircraft with HOSMGEN. In AIAA Modeling and Simulation Technologies Conference 3529.
View PDF